|
|
|||||
| 前書 | |||||
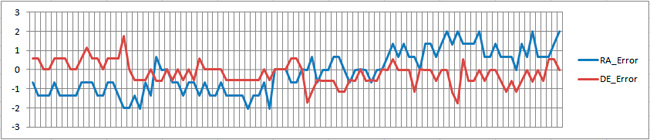
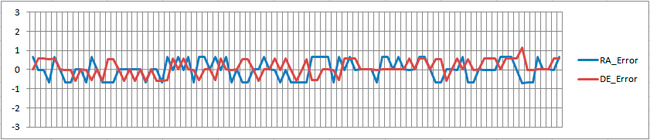
| EQ6Proを使い始めて2年になろうとしています。 導入精度が高く、この値段でベアリングを多用している点、マイクロステッピングを使用している点など、コストパフォーマンスに優れた赤道儀です。1000mmの直焦点でも恒星を点状に写すことのできる精度があると思っていましたが、εの光軸をきちんと合わすようになってみると東西方向に1ピクセル分ほど長く伸びているとか、風に弱いとか、精度の低さを知ることになってきました。 そんなときによっちゃんの赤道儀の補正量が0.15ピクセルぐらいだということを聞き、かなりのショックを受けました。これはわたしの10倍の精度で駆動していることになります。 こんなこともあり、以前からお世話になっているJr.さんに電気系統のことをメールで教えていただきました。 今回の改造はそんなメールでのやり取りから実行することになったのです。 下のグラフは改造前のガイドエラーログです。現在の補正値とは違いますが、2ピクセル以内が限界でした。 *風は無風に近く、ガイド星の光量も250近くある星をガイド星にしての追尾状態です。 きちんと調整をしていれば、 |
|||||
 |
|||||
|
|
|||||
| 純正の駆動部 | |||||
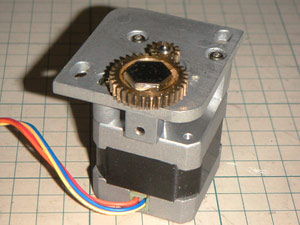 |
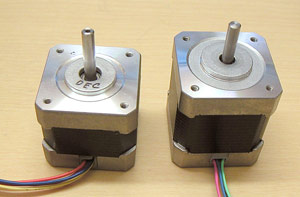
赤道儀からモーターユニットを外してみました。 左の写真はDEC側のユニットです。 モーターは4本線が出ていますので、バイポーラ2相ステッピングモーターのようです。 ギア部は3段階の減速ギアとなっており、モーターの台座に第2ギアが固定されています。 この第2ギアがDEC側は遊びが大きく、指で押すと芯がぐらつく状態でした。 RA側は遊びが全くなく、調整が渋い状態でした。 第2ギアの軸受けがどんなになっているのか、疑問に思いました。 |
||||
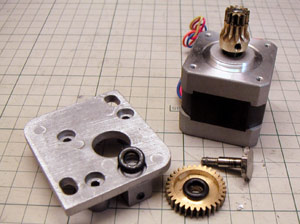
| 台座からモーターとギアを外した写真が右の状態です。 ちょっと唖然とする作りです。 他の駆動部分ではベアリングを多用しているのに、この第2ギアだけはギアに対してねじだけで軸受けをしギアの上下をグリス付きのOリングで挟み込んでいるだけです。 また、第1ギアとこの第2ギアのかみ合わせを調整する機能は全くありません。いや、ひょっとしたら、モーターの取り付けねじは3mmに対して3.4mm程度の穴が台座に空けているので、この部分で調整をするのかもしれません。 この部分は大きく変更をしなくてはいけないようです。 |
 |
||||
| 駆動部の変更部品 | |||||
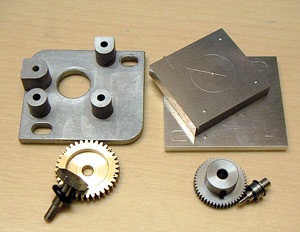 |
○台座部:ジュラルミンの5mm厚と8mm厚を組み合わせるようにしました。 ○ギア:純正は0.8モジュールのギアでしたが、これを0.5モジュールの炭素鋼のものに変更しました。第2ギアは減速比と関係がありませんので、大きさは自由に変えることができます。 購入したギアの歯数は 第2ギアは純正のものも、RAとDEC側では若干歯数の違うものが使用されていました。 撮影に行き、大きな間違いに気付きました。 まず、アライメントを取るために一等星を導入するといつもより赤緯赤経ともに、大きく外れているのです。そのまま、導入し、ガイドをかけると西側の補正を繰り返すのです。 しかし、この日の撮影はうまくいくわけですが、その原因については下記で述べます。(馬鹿です) ○軸受は真鍮製5mmのスペーサーを購入しました。それに、内径5mm外径8mmのミニチュアベアリングを使うことにしました。 |
||||
 |
○モーター:左が純正のモーターです。片軸で5mm径の42mm角のものです。でも、どこを探してもモーターの型番どころかスペックを調べる手がかりの番号が何一つありません。 右は今回購入したオリエンタルモーターのPK245DAです。たぶん、純正よりかなりトルクが大きくなると思われます。回した手ごたえもかなり重く感じ、いい感じです。 この高トルクモーターをRA側に使い、DEC側は費用節約のため純正のものを使うことにしました。 DEC側はのちに不満を感じるようでしたら、同クラスのモーターに付け変えるつもりです。 |
||||
| 台座の製作 | |||||
| 以前、Jrさんが「CNCで工作してあげるよ。」と、やさしい言葉をかけていただいていたのですが、自分でしてしまいました。いえ、自分でしたかったのです。 使った道具は、ボール盤、金のこ、やすりです。丸半日かかりました。 ボール盤に使った刃は3.2と5.2mmのドリル刃、8と3mmのエンドミル、22mmのホールソーです。 工作の一番難しいのは調整ができるように小判型の穴をくりぬくところです。エンドミルとやすりを使って苦労しました。 うーん。「芯のぶれないボール盤を買わないといけないなぁ」と痛感。 |
 |
||||
| 組み立て | |||||
 |
左の写真は組み立てを終わったユニットの写真です。こう見るとかっこいいですね。(自己満足です。) 第1ギアの軸径を4→5mm、第2ギアを5→8mm、第3ギアを8→12mmにしばたさんにお願いして拡張していただきました。 第2ギアを組むときにギア穴8mmの上下を外径8mm内径5mmのフランジ付きのベアリングで挟み、5mmのスペーサーに差し込みました。上下をワッシャ浮かせてねじ止めをしました。 動きはとてもなめらかで軸ぶれもありません。 後は、バックラッシュの調整です。 上の写真の下側の8mm厚の台座に第2ギアを止めています。この台座をスライドさせてバックラッシュを調整します。(第2ギアを第1ギアに寄せるという感じ)バックラッシュ0で調整しています。 |
||||
|
|
|||||
 |
大きな間違いの原因:ギア比を間違えたのです。 第2ギアの歯数は無視して、純正は0.8モジュールの第1ギアは12歯、第3ギアは48歯と数えたつもりで減速比が1:4と思いこんでいたのです。ところが、もう一度数えなおすと第3ギアは47歯しかありません。 がーん。減速比は3.91666…の循環小数。何で、48歯でプログラムしないんでしょう? そのうえ、SS2000PCのようにプログラムでギア比の修正ができる項目がないようです。 まだ、問題が。入るスペースでこの比率を満たすギアがないのです。0.8モジュールの47歯自体が売っていません。 そこで、いつもお世話になっている Jr.さんに相談したところ、第3ギアの80歯はを変えないでエクセルのマクロで近似値を見つけてくれました。2段階減速です。 第1ギア 第2ギア 第3ギア 52歯 - 80歯 22歯 - 56歯 このギア比で3.916083916になります。かぎりなくOKでしょうね。 第2ギアの工作に神経を遣いました。 まずは軸径の拡張ですが、ストレートリーマというものを使いました。 0.1mm刻みで売られています。8mmなどの整数径は1000円しません。それから、ハブの部分を削り軸の13mmに合わしました。 それと難しいのはこの2枚の接合です。溶接ができればいいのですが、接触面は無理で片側の面に穴をあけて溶接したいところですが届かないかも? 結局、ねじ止めをしました。位置を保つのが難しかった。 |
||||
|
|
|||||
| モーター電源の改良 | |||||
 |
モーターユニットを基盤につなぎテストしてみました。モーターからの接線の色が違うためもたつきましたが、RA,DEC側ともに動きました。 しかし、ここで問題が・・・。 新しいモーターを使用したRA側のギアの動きが少しおかしいのです。 よく見ていると動きに波があるのです。短い周期でスピードが落ちるという感じです。 ここで頼りにするのはJr.さんです。Jr.さんいわく。「基盤から、モーターへの供給電流は0.75A/相程度です。(基盤から分かるんだ)抵抗を並列に追加することで1A/相にあがります。1.5A/相へも上げることができますが、これで電圧が低下するとオーバーロードしますから、電圧の強化が必要です。」 徐々に並列抵抗を小さい値にしようと2Ωを接続しました。これで、計算上は0.99A/相が流れるはずです。 わたしには深くは分かりませんが、I=E/R。抵抗が小さくなれば電流は大きくなる。このぐらいしか分かりません。 少しずつ並列抵抗の値を小さくし、電圧低下を監視することにしました。 |
||||
| 後日さらにモーター電源周りを強化するために右の部品を買いました。 左からコンデンサー、並列用抵抗、インダクタンス、ダイオード、スイッチングレギュレータです。 もちろん、部品の選定はJr.さんです。 |
 |
||||
 |
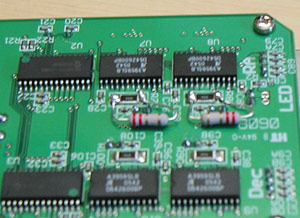
写真は交換を完了した基盤の写真です。ひとつ問題だったのが大きくなったコンデンサーです。もとの位置にとめると基盤の足の方が短く、納めることができません。 ので、裏側から取り付けることにしました。 レギュレーターを壊すというトラブルはありましたが、どうにか完了することができました。レギュレータはチップ背面がハンダされています。チップを取るときに基盤をめくってしまわないように気を付けてください。 最近ますます老眼が進んできて、このたこ足のはんでさえ困っています。どうもレギュレータを壊した原因はショートさせたみたいです。 今回の並列抵抗は1Ωで1.24A/相が流れるはずです。 こう電流が流れるとドライバーチップが熱を持ってきます。ヒートシンクを付けた方が安全です。(とのことです。) |
||||
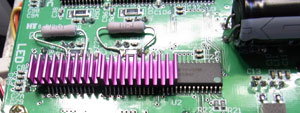 |
電源の強化とともにドライバーチップが結構熱くなります。 チップを保護するためにパソコンのメモリーに使われるヒートシンクを貼っておきました。サイズが合っていませんが、まあいいでしょう。 |
||||
|
|
|||||
| 組み付け | |||||
 |
あたるだろうと思っていましたが、やはり当たりました。何が? 第1ギアとかむ第2ギアですが、一枚分のクリアランスしかありません。 それで15mmほどになるようにクリアランスを広げるようにしました。 この部分はウォームシャフトのケース内ですので外からは見えません。でも、もちろん赤緯側だけではなく、赤経側も分解しなければなりません。 私は赤経側を分解するのは初めてです。でも、赤緯側を分解できれば赤経側を同じような作るです。 |
||||
 |
左の写真が組み付けた画像です。 一見するとオリエンタルモーターのラベルが輝いて見えますね。 チップ用のヒートシンクは付けていませんが、ほぼ完成です。 重い鏡筒を付け、バランスを崩した状態で赤緯、赤経ともに高速駆動をしてみましたが、力強く動かすことができました。(ノーマルモーターでも問題はなさそうです。) 使用電流は12Vで両軸高速導入時に 1.53A 追尾状態で0.82Aという消費電流です。 |
||||
|
|
|||||
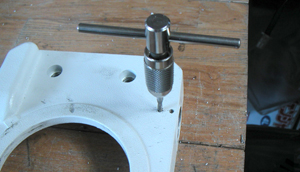
| ウォームシャフト受けのロック | |||||
| タップを立てているのはウォームシャフトのベアリングに与圧をかけるリングねじをロックするためです。 このリングねじを緩まないように締めていくと与圧がかかり過ぎて、シャフトが重くなります。ガタがなく軽く動くところに調整すると使っている間に緩んできます。 前から気になっていたのですが、新たにタップを立てている隣に既製の穴があります。ねじはきっていませんが、こうするためだったように思えます。 |
 |
||||
 |
新しく設けたセットスクリューねじは先のとがった3mmのものです。 先のとがった物の方がリングねじへのダメージが少ないように思うのです。 これで、高速回転を頻繁に使ってもリングねじがゆるんでくることはなくなりました。 |
||||
|
|
|||||
| 後書 | |||||
 |
|||||
| 上記のように改造と調整をした結果のガイドエラーログです。補正パラメーターは以前と変えていませんが、より安定した駆動ができるようになってきました。 安定した大きな要因は第1に、各部伝達系と、軸受の調整だと思います。これだけベアリングをふんだんに使っているのですから、ガタがなく軽く動く状態に調整できたことがよかったと考えます。 第2はギアの伝達の改造です。0.5モジュールと言う細かいギアを使って、ベアリング受けでガタがないようにすることができ、ほとんどバックラッシュもありません。 さらに、ガイドソフトのパラメーターをより切り詰めて、細かい補正ができるように設定を変更すれば0.5ピクセルの補正はできそうです。 でも、よっちゃんのNJP改造のような0.1ピクセル以内というのは驚異的です。 |
|||||
| 2010年6月 | |||||
|
|
|||||